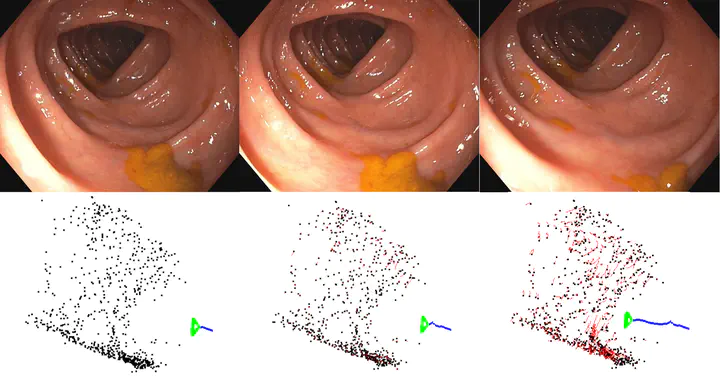
 Tracking the camera pose and scene deformation in a human colonoscopy from Endomapper dataset. Top: images from the sequence. Bottom: camera trajectory in blue, undeformed map points in black and map point deformation trajectories in red.
Tracking the camera pose and scene deformation in a human colonoscopy from Endomapper dataset. Top: images from the sequence. Bottom: camera trajectory in blue, undeformed map points in black and map point deformation trajectories in red.
Abstract
Monocular SLAM in deformable scenes will open the way to multiple medical applications like computer-assisted navigation in endoscopy, automatic drug delivery or autonomous robotic surgery. In this paper we propose a novel method to simultaneously track the camera pose and the 3D scene deformation, without any assumption about environment topology or shape. The method uses an illumination-invariant photometric method to track image features and estimates camera motion and deformation combining reprojection error with spatial and temporal regularization of deformations. Our results in simulated colonoscopies show the method’s accuracy and robustness in complex scenes under increasing levels of deformation. Our qualitative results in human colonoscopies from Endomapper dataset show that the method is able to successfully cope with the challenges of real endoscopies like deformations, low texture and strong illumination changes. We also compare with previous tracking methods in simpler scenarios from Hamlyn dataset where we obtain competitive performance, without needing any topological assumption.
Juan José Gómez Rodríguez
PhD student in Computer Vision
My research interests include Visual SLAM for rigid and deformable scenarios.