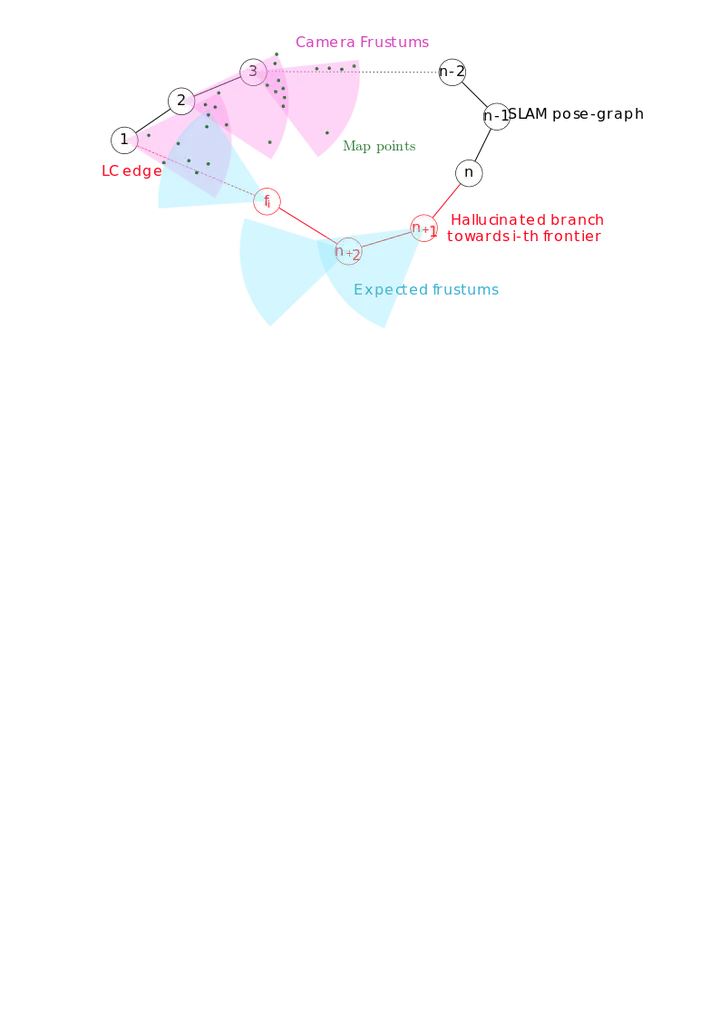
 Example of the graph hallucination process towards frontier
Example of the graph hallucination process towards frontier
Abstract
Deploying autonomous robots capable of exploring unknown environments has long been a topic of great relevance to the robotics community. In this work, we take a further step in that direction by presenting an open-source active visual SLAM framework that leverages the accuracy of a state-of-the-art graph-SLAM system and takes advantage of the fast utility computation that exploiting the structure of the underlying pose-graph offers. We achieve fast decision making through careful estimation of a posteriori weighted pose-graphs and by employing a utility function that balances exploration and exploitation principles.
Type
Publication
In ROBOT2022 Fifth Iberian Robotics Conference Advances in Robotics, Volume 1
Juan José Gómez Rodríguez
PhD student in Computer Vision
My research interests include Visual SLAM for rigid and deformable scenarios.