Biography
Welcome to my personal webpage! I am a third-year PhD student at the Robotics, Perception and Real Time (RoPeRT) group at the University of Zaragoza (Unizar) under the supervision of Prof. Juan D. Tardós. Previously I studied a Bachelors’s degree in Computer Science and a Master’s degree in Biomedical Engineering, both at Unizar where I started my career as a Computer Vision researcher.
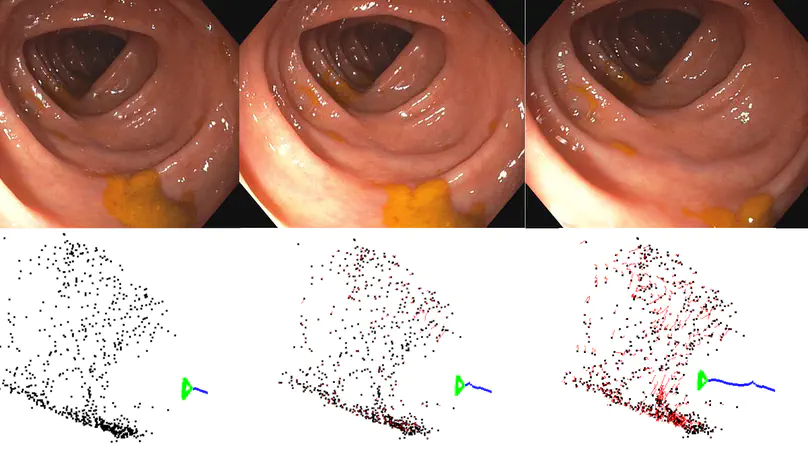
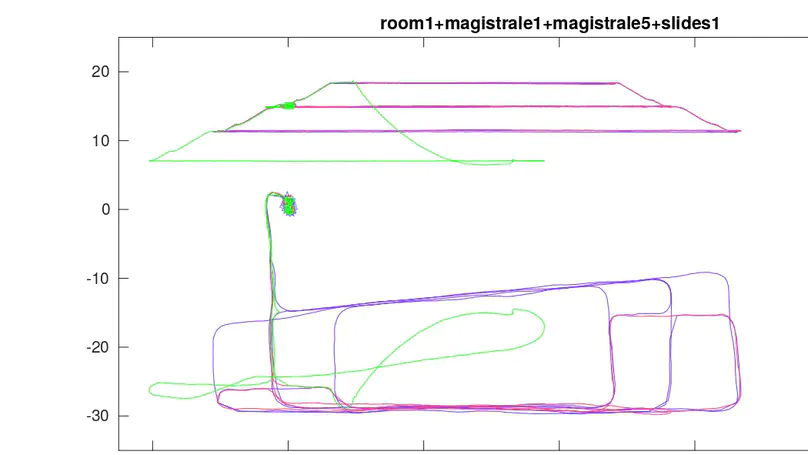
My work revolves how computers perceive and understand their surroundings by means of Visual Simultaneous Localization and Mapping techniques (V-SLAM). I am especially interested and motivated by those challenging situations that impairs the use of these technologies like deformable V-SLAM which has direct application to many other fields like Minimal Intrusive Surgery.
Download my resumé.
- Computer Vision
- Robotics
- Deep Learning
-
PhD in Computer Vision, 2023
University of Zaragoza
-
MEng in Biomedical Engineering, 2019
University of Zaragoza
-
BSc in Computer Engineering, 2018
University of Zaragoza
Experience
Researcher in Computer Vision:
- Rigid Visual SLAM for movile agents
- Deformable Visual SLAM for medical sequences
Assistant professor:
- Introduction to Machine Learning
- Simultaneous Localization and Mapping

Featured Publications
Recent Publications
Contact
- jjgomez@unizar.es
- +34 711 75 17 75
- 1 Maria de Luna, Zaragoza, Aragón 50018
- Enter Ada Byron Building, first floor, lab 1.08